
一般的エリアカメラの場合、カラーの画像を生成するには
1個の画素に対してRGB(Red/Green/Blue)の色情報が必要になる。
しかし、これらを一度に取得する方法は無いので
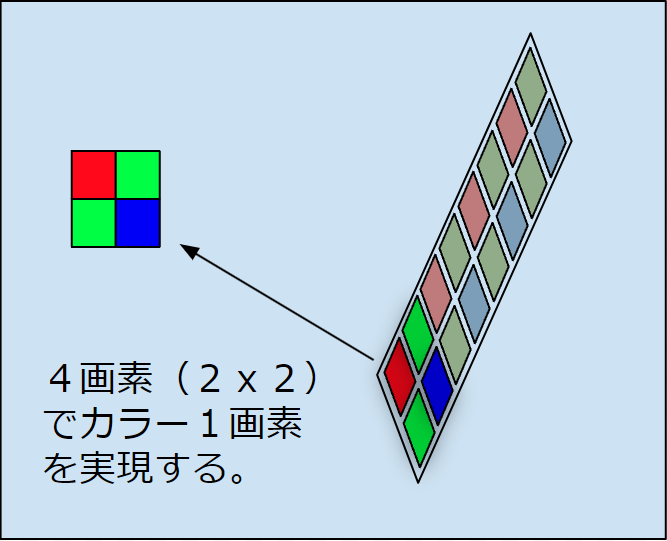
RGBそれぞれの色を担当する色フィルター画素を配置し
(Gを1個増やして正方形にする)
4画素(2x2画素)でカラー1画素を実現する。
この市松模様配列をBayer配列という。

ただし、この方式には弱点があり、偽色という現象が起きる。
ラインセンサーカメラの場合
実現方法が幾つかある。
1)2ライン並べてR/Gr/Gb/Bの4種画素をエリアカメラと同様に配置して実現する。
- 偽色が出てしまう。
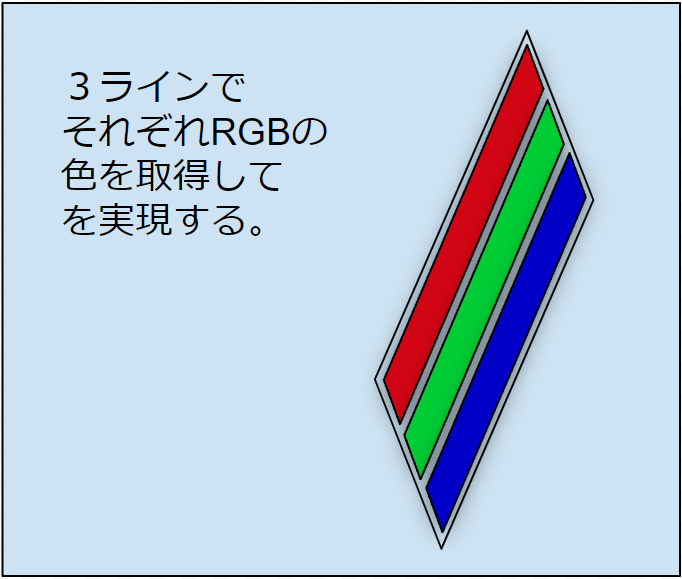
2)3ライン並べて、画素単位ではなくライン単位でRGBの色フィルタを付けて実現する。
- 3ラインの間に隙間がある場合が多く(恐らく回路を置く場所)、測定箇所が3ラインで、それぞれズレてしまうのでラインずらし(取得画像を間隔に合わせて各ラインを貯めて出して遅らせる)などをして揃える必要がある。
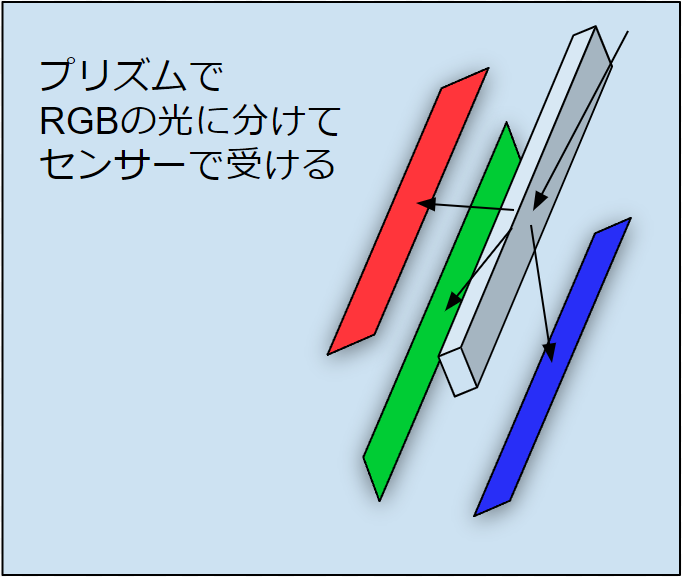
3)白黒Singleラインセンサーを3個用い、プリズムでRGBに分離した光を受信して実現する。
- 対象の流れ方向でズレはない。
- プリズムとセンサーの貼り合わせが難しく高価。
使用環境や、求める性能によって、もっとも丁度よい方式が変わってくるため、このようなバリエーションが存在する。